切削加工後の組み立てを自動化/中央工機
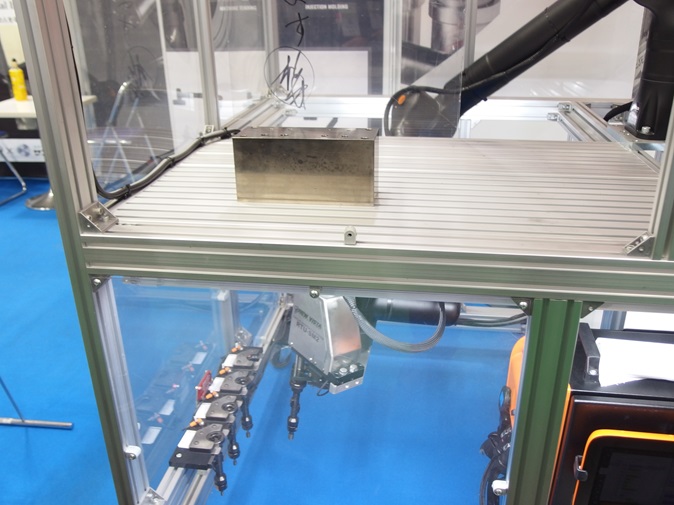
中央工機(3D06)は、工作機械などで部品加工をした後の組み立て工程の自動化を提案する。まず写真左のロボットアームがばら積みされたねじをピッキングしてジグに立て、自律走行型搬送ロボット(AMR)が写真右のロボットの元へ運び、そのロボットがねじをつかんで締結する。左右のロボットは、それぞれに搭載するビジョンセンサーでAMRの停止位置のずれを補正する。
同社はロボットなど自動化システムの提案に力を入れており、内賀嶋祐亮営業企画課長は「ロボットやビジョンセンサー、AMR、ジグに至るまでワンストップで用意できるのが強み」と話す。